Das Arm-Modul des Crawlers ist ein klassischer Roboter-Arm und verlangt uns Mechatronikern Wissen aus allen Teilgebieten unseres Lernspektrums ab. Wie bei jedem Konstrukt dieser Art spielt auch bei uns der Endeffektor eine wesentliche Rolle. Hier müssen mannigfaltige Ingenieursbetrachtungen angestellt werden, denn es sollen unterschiedliche Tür-Arten geöffnet werden, womit das Endstück sehr dynamisch ausgelegt werden muss. Nachvollziehbar ist auch, dass die hebelartige Geometrie des Roboterarms besondere Anforderungen bezüglich der mechanischen Konstruktion verlangt. Unsere Gruppe vollbringt also einen Balance-Akt zwischen effektivem Leichtbau, ausreichender Steifigkeit des Arms und guter Dynamik.

Im Wintersemester 2014 / 15 gab es einen großen Umbruch in der Grundstruktur des Roboter-Arms, der erfreulicherweise zum Ergebnis hatte, dass sich das Modul im Anschluss in einem generell funktionsfähigen Zustand befand.
Somit wurde im Sommersemester 2015 auf diesem neuen Konzept aufgebaut und die Prozesssicherheit, die stellenweise sehr mangelhaft war, verbessert. Maß-Ungenauigkeiten wurden händisch eliminiert und so die Passgenauigkeit der Bauteile verbessert. Die Antriebsriemen konnten nun variabel in ihrer Spannung eingestellt werden und es befand sich dann ein elektrischer Anschlagsschutz an den Gelenken, um den Roboter-Arm bei Fehlfunktionen vor der Eigendestruktion zu schützen. An vielen Stellen wurden zusätzliche Maßnahmen zur Gewichtsreduzierung durchgeführt und nebenbei eine qualitativ hochwertige Animation des Roboter-Arms erstellt.
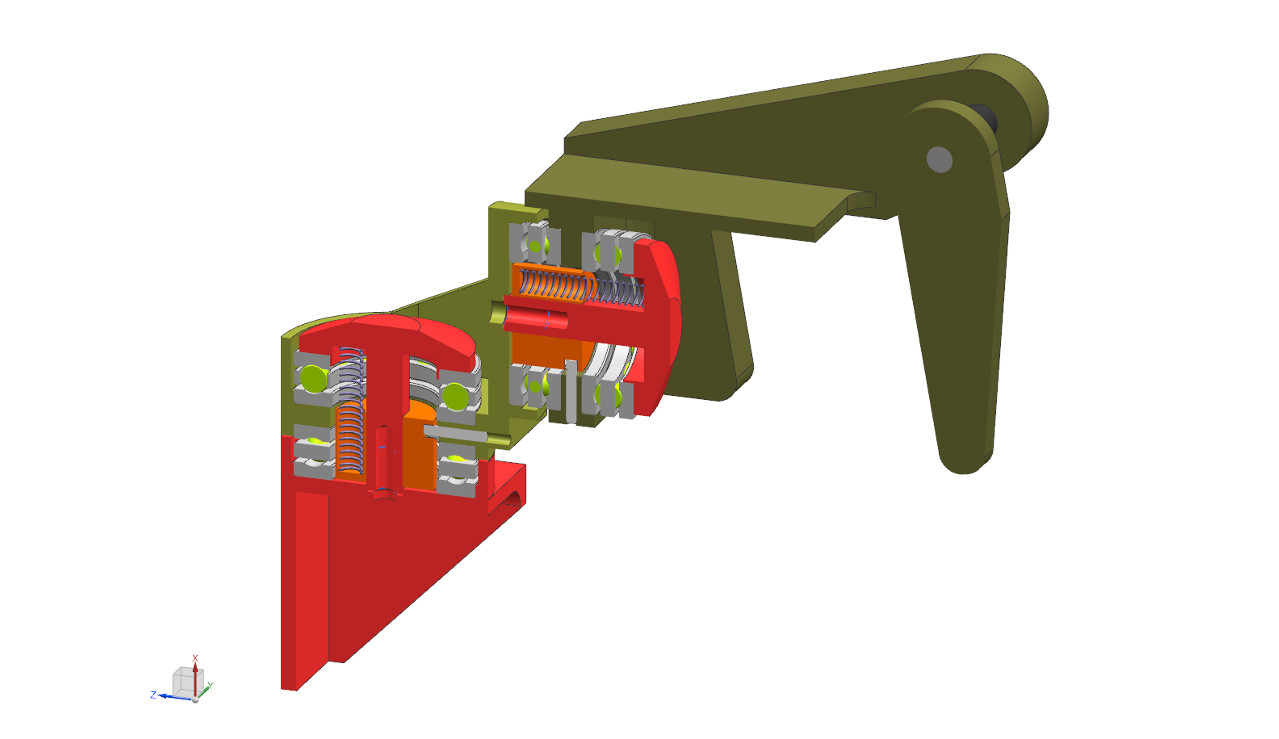
Ein Kernpunkt war außerdem die Erkenntnis, dass es ein großes Einsparungspotential bezüglich des Gesamtgewichts des Crawlers gab. Um dieses Potential auszuschöpfen, war aber ein sehr dynamischer und stabiler End-Effektor von Nöten, der Türen sicher öffnen könnte, ohne dass dafür ein spezielles Modul von Nöten wäre. In Zusammenarbeit mit zwei öffentlichen Forschungsinstituten wurde ein funktionierender Prototyp gedruckt und auf den Namen `Greifer` getauft. Dieser wird anhand hoch-innovativer Form-Gedächtnis-Legierungs-Aktorik aus dem Leichtbausegment bewegt, damit keine zusätzlichen Motoren verbaut werden müssen, die massiv zum Gesamtgewicht beitragen würden. Die Vision hierbei war es, dass der Greifer schlussendlich aus Aluminium gefertigt werden würde und dann das Modul der Gruppe Türöffner obsolidiert.
Dieses Potential sollte in dieser Gruppe auch in Zukunft im Fokus liegen, denn damit würde das Gesamtgewicht des Crawlers bei weitem stärker reduziert werden, als mit allen Topologieoptimierungen sämtlicher Gruppen.
Das oben bereits erwähnte Konzept wurde noch einmal weiterentwickelt. Im Wintersemester 2015/ 2016 ist ein elektrischer Greifer entwickelt und gebaut worden, der mehr Möglichkeiten und mehr Sicherheit in punkto Zuverlässigkeit bieten sollte. Hauptaugenmerk in dieser Gruppe für das Jahr 2016 war die Integration des neuen Greifers in das Crawler-System. Dazu gehören Ansteuerung des DC-Motors des elektrischen Greifers, die Montage mit Testläufen in Zusammenarbeit mit dem Team Motorsteuerung, um Kinderkrankheiten zu beseitigen und die Stabilität zu verbessern, um Schwingungen zu reduzieren und eine einfachere Bedienbarkeit zu gewährleisten. So standen im Wintersemester 2016/ 2017 vor allem die Applikationstests im Vordergrund und noch kleine Verbesserungen.
Musik des Filmes von http://audio.ibeat.org/?ccm=/files/enoe/705